AI + Rust 两连发:从 20 分钟到 12 秒,博客宇宙的构建优化之旅
背景:一个项目,两个瓶颈
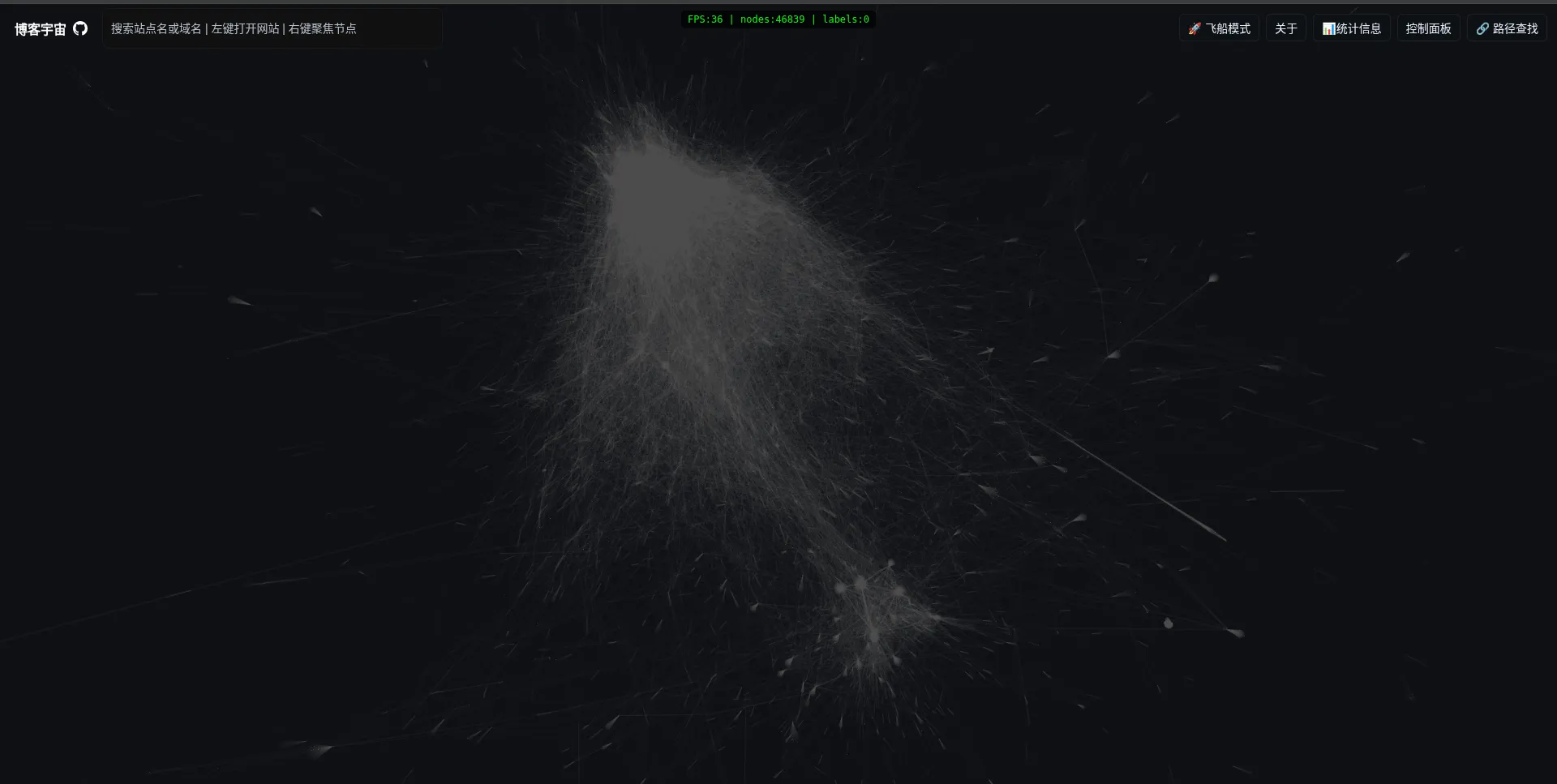
FriendLinks 是一个博客宇宙可视化项目。它爬取数千个独立博客的友链数据,在构建时生成两个核心产物:
| 产物 | 说明 |
|---|---|
/graph.bin |
3D 力导向图二进制数据,46839 节点、89454 边,前端渲染为可交互的博客宇宙 |
/stats.json |
六度分隔统计数据,56941 节点的全连通图 BFS,展示任意两个博客之间的平均距离 |
每次 astro build,这两个端点各占一半的构建时间。而且都很慢。
第一个瓶颈:stats.json 的 BFS
六度分隔的核心是 All-Pairs Shortest Paths——对图中每一个节点做 BFS,统计距离分布。
旧方案:JS 抽样(无奈之举)
56941 个节点,做全量 BFS 的复杂度是 。在 JavaScript 里,这根本跑不完。
所以旧代码做了妥协:只在最大连通分量里随机抽 3000 个节点做 BFS,然后把距离分布按比例放大。
// 旧:采样 BFS(约 Jul 1)const sampledNodes = shuffle(largestComponent).slice(0, 3000);for (const a of sampledNodes) { // 手动 TypedArray BFS,队列复用,内联计数...}// 除以 2(无向图双向计数),按节点比例放大...经过几次优化后(TypedArray 复用、内联计数),3000 个节点的 BFS 已经跑得动了——但还是抽样估算,不是精确值。而且整个 /stats.json 端点还是要花相当长时间。
新方案:Rust 全量 BFS
7 月 3 日晚上,我让 AI 用 Rust + NAPI-RS 写了一个 BFS 原生模块——@xingwangzhe/bfs-rs。
核心是 CSR(Compressed Sparse Row)格式的邻接表 + Rayon 并行:
// bfs-rs: 全量 BFS,Rayon 并行pub fn bfsMergedHistogram(adj: Vec<u32>, offsets: Vec<u32>, n: u32) -> MergedHistogram { // Rayon par_chunks(500),每个 chunk 从不同源节点并行 BFS // Mutex 保护的共享 histogram,Rust 侧直接聚合,不返回到 JS}JS 侧从几百行手动 BFS 循环简化成一次函数调用:
// 新:一行调用const merged = bfsMergedHistogram(adjArr, offArr, n);// merged.histogram 就是全量 56941 节点的精确距离分布升级过程也很有意思——第一版 bfsAll 返回了所有 个距离,直接 内存 segfault。改成 bfsBatch 分批处理,最后进化到 bfsMergedHistogram,Rust 侧用 Mutex 聚合 histogram,JS 侧只需要接收最终结果。
从“抽样估算”到“全量精确”,同样的时间甚至更快。
第二个瓶颈:graph.bin 的力导布局
3D 力导向图需要把 46839 个节点布局到三维空间。用的是经典的 Barnes-Hut N-body 模拟 + 弹簧力 + 中心力。
旧方案:d3-force-3d(20 分钟)
最初用 d3-force-3d,效果很好,但太慢了。JavaScript 里单 tick 就要约 1 秒,收敛需要 300+ tick。每次构建光力导仿真就要 5 分钟以上。代码里设了 14 分钟的超时上限——在 CI 上经常超时。
构建日志(旧版): tick 50/∞ α=0.3642 46839 节点 (···) tick 100/∞ α=0.1326 46839 节点 (···) ... ✔ 力导仿真完成 · 300 tick · 320.5s ← 5 分多钟!期间调整过无数次参数——theta 从 0 调到 2.5,TICKS 从 800 砍到 15,repulsion 从 400 改到 3000——但始终突破不了 JS 单线程的天花板。
新方案:force-rs(12 秒)
7 月 4 日,让 AI 用 Rust 完成了 Barnes-Hut 八叉树 + Rayon 并行。d3-force-3d 的完整力模型——多体斥力、degree-biased 弹簧力、质心平移——全部移植到 Rust,API 简化成一个函数:
const state = new Float64Array(n * 6 + 1); // [x,y,z,vx,vy,vz, ...alpha]const links = new Uint32Array(edges.length * 2);const opts = { repulsion: 3000, linkDistance: 500, centerStrength: 0.005, theta: 0.8, velocityDecay: 0.6, alphaDecay: 0.02,};
for (let i = 0; i < TICKS_MAX; i++) { state = simTick(state, links, n, opts); // 一行}编译、运行——输出正常。但打开 .bin 文件,坐标炸了:
范围: [ -5,424,070,723 , 5,165,802,560 ] ← ±54 亿!接下来是一段精彩的调试过程。AI 加了逐 tick 的 debug 输出:
tick 1: max_rep=2.75e3 max_spr=1.52e3 max_v=1.87e3 ← 正常tick 2: max_rep=4.0e1 max_spr=2.07e4 max_v=1.10e4 ← 弹簧力涨了 10 倍!tick 3: max_rep=2.32e1 max_spr=8.36e4 max_v=4.16e4 ← 又涨了 4 倍!...tick 10: max_rep=0.04 max_spr=1.70e9 max_v=7.28e8 ← 弹簧力 17 亿!tick 12: max_rep=0.00 max_spr=2.12e10 max_v=6.17e9 ← 超 clamp 上限!排斥力在正常衰减,但弹簧力每 tick 指数增长约 4 倍。隔离测试发现:无连接时坐标正常,问题一定在弹簧力。
AI 逐行对比了 d3-force-3d 的 link force 源码,发现了根因——bias 方向写反了:
// ❌ 错误:用自己的度数做 bias → 高度数节点受力大,低度数叶子节点被吹飞let bias = my_deg / (my_deg + deg[ni] as f64);
// ✅ 正确:用对方的度数做 bias(d3-force 行为)→ 叶子节点被锚定let bias = deg[ni] as f64 / (my_deg + deg[ni] as f64);d3-force 的设计里,degree=1 的节点应该获得 91.7% 的弹簧力,这样才不会被 46839 个节点的排斥力吹飞。bias 一反过来,38000+ 个叶子节点每人只拿到 8% 的力,直接原地升天。
一行代码,几个小时的调试,坐标从 ±54 亿变回正常的 ±26 万。
除此之外还修复了 4 个其他偏差(中心力模型、近距离软化、Barnes-Hut 修正因子、 判定)。修复后 14 个测试全过。
性能对比
| 端点 | 旧方案 | 新方案 | 提升 |
|---|---|---|---|
/graph.bin 力导仿真 |
d3-force-3d JS,~5 分钟(300 tick) | force-rs Rust,~8 秒(100 tick) | ~40x |
/stats.json BFS |
JS 抽样 3000 节点,估算 | bfs-rs Rust,全量 56941 节点精确 | 从估算变精确 |
| 单 tick(47K 节点) | ~1.0 秒 | ~0.08 秒 | ~12x per tick |
| 整体构建 | ~20 分钟 | ~40 秒 | ~30x |
整体构建从 20 分钟压到了 40 秒左右。更关键的是,graph.bin 从 300 tick 降到了 100 tick 就能收敛(因为 Rust 的力模型和 d3-force 一致的精度),而 stats.json 从“抽样估算”变成了“全量精确”。
CI/CD:自动多平台发布
两个包都用 GitHub Actions 做了自动化。拿 force-rs 举例:
# .github/workflows/CI.ymlbuild: strategy: matrix: - target: x86_64-apple-darwin - target: aarch64-apple-darwin - target: x86_64-pc-windows-msvc - target: x86_64-unknown-linux-gnu - target: x86_64-unknown-linux-musl - target: aarch64-unknown-linux-gnu每次推送,CI 在 6 个平台上编译、跑 18 个 node 版本组合的测试、然后把所有 .node 二进制打成一个 1.3MB 的 npm 包发布,理论上可以发几个子包来减小大小,但那样需要设置npm,我懒。
bun add @xingwangzhe/bfs-rs # 全量精确 BFSbun add @xingwangzhe/force-rs # 百倍加速力导布局在 FriendLinks 项目里,只需要 bun update 就能用上最新版。
时间线
| 日期 | 事件 |
|---|---|
| 6 月底 ~ 7 月 2 日 | 反复调参 d3-force-3d,始终突破不了 JS 瓶颈 |
| 7 月 1 日 | 用 JS 实现采样 BFS(最大 3000 节点),优化到可接受速度 |
| 7 月 3 日 晚 | AI 写出 bfs-rs v0.1.0:从 bfsAll 到 bfsBatch 到 bfsMergedHistogram,一晚上三次迭代 |
| 7 月 4 日 上午 | AI 写出 force-rs:Barnes-Hut + Rayon。调试发现 bias 反转,修复后发布 v0.1.2 |
| 7 月 4 日 下午 | FriendLinks 全面切换到两个 npm 包,构建从 20 分钟降到 40 秒 |
两个晚上,两个 Rust 轮子,一次彻底的构建优化。
感想
这次经历让我对两个东西有了新的认识:
| 认识 | |
|---|---|
| 1 | NAPI-RS 的门槛比想象的低。 一个 ~200 行的 lib.rs + 一个标准 Cargo.toml,就能把 JavaScript 里最慢的部分替换成 Rust。状态直接在 Float64Array 和 Vec<f64> 之间零拷贝传递,不需要序列化。NAPI-RS 生成的 index.js 自动处理了平台检测和 fallback。 |
| 2 | Rust是AI的Native语言。 我不擅长 Rust——借用检查器、生命周期标注、Rayon 的 Send + Sync 约束——这些对 Rust 新手来说都是拦路虎。但 AI 帮我处理了这些细节,让我能聚焦在“力模型是否正确”这种更高层次的问题上。最让我印象深刻的是调试环节:AI 能同时阅读 d3-force-3d 的 JS 源码和 force-rs 的 Rust 源码,逐行对比力模型公式,发现了那一行 bias 反转。这种跨语言的细致审计,如果纯人工做,可能要多花好几天。 |
一个晚上 BFS,一个晚上力导布局。从“构建太慢了先玩会手机”到“咦这就跑完了”。
项目链接:
- @xingwangzhe/bfs-rs — Rust 全量精确 BFS
- @xingwangzhe/force-rs — Rust Barnes-Hut 力导布局
FriendLinks(links.needhelp.icu)是一个博客宇宙可视化项目。
AI + Rust 两连发:从 20 分钟到 12 秒,博客宇宙的构建优化之旅
作者:xingwangzhe
本文链接:https://xingwangzhe.fun/posts/ai-rust-bfs-force-two-wheels/
本文采用 知识共享署名-非商业性使用-相同方式共享 4.0 国际许可协议进行许可。
留言评论